- Bestellung und Vorbereitung
- 1.Wie kann ich DJI Terra erwerben?
Offizieller DJI Store: Landwirtschaft-Version, Pro-Version (online) und Wartungsgebühr für Upgrade, Electricity-Version (online)
Händler: Pro-Version (online / offline) und Wartungsgebühr für Upgrade, Electricity-Version (online), Cluster-Version (offline) und Wartungsgebühr für Upgrade
Darüber hinaus wird eine Lizenz für die Landwirtschaft-Version (1 Jahr) kostenlos mit dem Kauf der Landwirtschaftsdrohnen MG-1S Advanced, MG-1P, und AGRAS T-Serie zur Verfügung gestellt.
- 2.Wie lange ist meine DJI Terra Lizenz aktiv?
Die Gültigkeit deiner Lizenz beginnt mit dem Tag, an dem das Gerät mit DJI Terra verbunden wird.
DJI Terra für Landwirtschaft 1 Jahr
DJI Terra Pro 1 Jahr
DJI Terra Pro Dauerhaft
DJI Terra Electricity 1 Jahr
DJI Terra Cluster Permanent
- 3.Was benötige ich zur Nutzung von DJI Terra?
1. Eine Drohne der Phantom 4 Serie, die DJI Terra unterstützt, sowie mehrere Akkus.
2. Ein Laptop, eine microSD-Karte und ein Kartenlesegerät.
3. Ein passendes Kabel (Phantom 4, Phantom 4 Pro, Phantom 4 Advanced: USB-A auf USB-A; Phantom 4 Pro+ V2.0: USB-A auf Micro-USB; Phantom 4 RTK: USB-A auf USB-C/USB-C auf USB-C).
- 4.Welche Systemvoraussetzungen müssen erfüllt sein, um mit DJI Terra 2D- und 3D-Rekonstruktionen durchzuführen?
Der Computer muss ein 64-Bit Windows 7 Betriebssystem oder höher und die notwendige Hardwarekonfiguration haben.
Eigenständige Berechnung:
Mindestanforderungen an das System: 32 GB RAM, 4 GB Grafik-RAM (die Rechenleistung für die NVidia-Grafikkarte sollte Shader-Modell 3.0 oder besser sein).
Empfohlene Systemanforderungen: 64 GB RAM oder mehr. NVidia 2070 Grafikkarte oder höher.
Wenn die Konfigurationsanforderungen erfüllt sind, können mit jedem zusätzlichen 10 GB freiem Speicher weitere 4.000 Fotos verarbeiten werden. Fortgeschrittenere Konfigurationen ermöglichen die Verarbeitung von einer größeren Anzahl Fotos und eine schnellere Rekonstruktion. Verschiedene Hardwarekonfigurationen haben keine Auswirkungen auf die generierten Modellergebnisse.
Berechnung des Clusters:
Weitere Informationen zur Konfiguration eines Geräts finden Sie in
Vorbereitung vor der ersten Nutzung von DJI Terra.
- 5.Welches sind die Drohnenmodelle von DJI Terra, die derzeit die Routenplanung unterstützen?
Phantom 4 RTK (Fernsteuerung), Phantom 4 Pro V2.0, Phantom 4 Pro+ V2.0, Phantom 4 Pro, Phantom 4 Advanced und Phantom 4. Die Phantom 4 unterstützt keine 2D-Kartierung in Echtzeit.
- 6.Kann ich die bezahlten Funktionen von DJI Terra auch ohne Internetverbindung nutzen?
Ja.
Bei der Offline-Version funktionieren alle bezahlten Funktionen nach der Installation auch ohne Internetverbindung.
Bei der Online-Version benötigst du für die Anmeldung eine Internetverbindung. Du kannst die bezahlten Funktionen von DJI Terra dann jedoch bis zu 3 Tage weiterhin nutzen, ohne dich erneut anmelden zu müssen.
- 7.Warum kann ich die Fernsteuerung nicht in den PC-Modus wechseln lassen?
Es gibt drei Ursachen für dieses Problem:
(1) Treiber nicht installiert Verbinden Sie die Fernsteuerung über ein USB-Kabel mit DJI Terra. Falls ein gelbes Ausrufezeichen im Gerätemanager erscheint, müssen die entsprechenden Treiber über einen Rechtsklick im Menüeintrag des Geräts installiert werden.
(2) Die Phantom 4 Pro+ Fernsteuerung (mit Display) verbindet sich nicht mit DJI Terra.
(3) Die Fernsteuerung verfügt über ein HDMI-Modul. Nur Fernsteuerungen mit einem HDMI-Modul, einer USB-Schnittstelle und einem Micro-USB-Anschluss können in den PC-Modus wechseln.
*Die Phantom 4 RTK und Phantom 4 Pro V2.0 Fluggeräte müssen in den Fernsteuerungsmodus wechseln.
- 8.Kann ich Geräte von der DJI Terra Lizenz entbinden?
Sie können Ihre Lizenzbindungen für DJI Terra für Landwirtschaft, Pro, Elektrizität und Cluster (ausgenommen die Landwirtschaftslizenz von Agras) lösen. Bitte nehmen Sie dafür Kontakt mit dem DJI Support auf. Eine Lizenz für ein Gerät kann einmal innerhalb eines Jahres entfernt werden. Eine Lizenz für drei Geräte kann zweimal innerhalb eines Jahres entfernt werden. Nach der Bearbeitung werden alle registrierten Geräte von der Lizenz entfernt.
- 9.Was ist der kostenlose Update-Zeitraum von 1 Jahr?
Dies ist der Zeitraum von einem Jahr ab dem ersten Aktivierungsdatum einer permanenten Lizenz nach dem Kauf, in dem Sie kostenlos auf jede in diesem Zeitraum veröffentlichte Version aktualisieren und alle in der Lizenz enthaltenen Funktionen nutzen können.
- 10.Meine Software ist in den bezahlten Update-Zeitraum eingetreten, aber ich habe keine Gebühr für die Durchführung des Upgrades und die Wartung bezahlt. Es sind ein paar Jahre vergangen und ich möchte die Software mit der neuesten Version aktualisieren. Muss ich die Gebühr für die Durchführung des Upgrades und die Wartung für die vorangegangenen Jahre bezahlen?
Ja.
- 11.Meine Software ist in den bezahlten Update-Zeitraum eingetreten, aber ich habe keine Gebühr für die Durchführung des Upgrades und die Wartung bezahlt. Ich habe seitdem eine neue Version heruntergeladen, die während der bezahlten Update-Periode freigegeben wurde. Kann ich sie verwenden?
Die bezahlten Funktionen stehen nicht zur Verfügung, aber Sie können immer noch die grundlegenden Funktionen verwenden.
- 12.Ändert sich der erste verbindliche Termin der Software, wenn die Verbindlichkeit der Software aufgehoben wird?
Die Update-Gültigkeitsdauer wird nicht übertragen.
- 13.Ich besitze zwei Lizenzarten: A und B (zum Beispiel Professional- und Electricity-Version). Bei beiden ist der Gültigkeitszeitraum für die Aktualisierung gleich.
Der Zeitraum für eine bezahlte Aktualisierung der Electricity-Version ist angelaufen, es wurde jedoch kein Upgrade und keine Wartungsgebühr bezahlt; auch bei der Professional-Version ist der Zeitraum für eine bezahlte Aktualisierung angelaufen, das Upgrade und die Wartungsgebühr wurden jedoch bezahlt.
Kann ich die Funktionen der Electricity-Version nutzen?Wenn du während des Zeitraums für bezahlte Aktualisierungen eine Version heruntergeladen und auf diese Version eine Aktualisierung vorgenommen hast, kannst du die Funktionen der Professional-Version nutzen, jedoch nicht die der Electricity-Version.
- 14.Kann ich die Hardware meines Geräts ersetzen, nachdem die Offline-Version damit verbunden wurde?
Nein, die Lizenz ist an die Hardware des Geräts gebunden. Somit würde die Lizenz durch einen Ersatz der Hardware ihre Gültigkeit verlieren.
- 15.Welche Funktionen sind in der Offline-Version beschränkt?
Die folgenden Online-Funktionen stehen im Offline-Modus nicht zur Verfügung:
- Entsperren von GEO-Zonen
- Laden von Karten und Suchen von Standorten
- Ohne Anmeldung bei einem DJI-Konto sind bestimmte Flugsteuerungsfunktionen in DJI Terra beschränkt.
- Flüge und Luftbildaufnahmen
- 1.Was ist der Unterschied zwischen Wegpunkt-, Kartierungs-, Schräg- und Korridor-Einsätzen und Detailinspektionen?
Wegpunkteauftrag: Planen Sie eine Route und erfassen Sie Fotos oder Videos an Wegpunkten entlang der Route.
Kartierungsauftrag: Erfassen Sie Fotos eines Bereichs zur 2D-Rekonstruktion.
Flugaufträge mit Schrägaufnahmen: Erfassen Sie Fotos eines Bereichs aus mehreren Kamerawinkeln zur Erstellung eines 3D-Modells.
Flugplanung entlang von Korridoren: Erfassen Sie Aufnahmen entlang eines länglichen Korridors (z.B. Flüsse oder Eisenbahnen).
Detailinspektionen: Markieren Sie Zielpunkte in einem rekonstruierten Modell und eine Flugroute wird automatisch generiert, sodass das Fluggerät Fotos an diesen Zielpunkten aufnehmen kann.
- 2.Warum gibt es fünf Flugrouten, wenn ich eine Oblique-Mission in DJI Terra anlege?
Der Schrägluftbildauftrag in DJI Terra nutzt fünf Flugrouten, um genau so viele Daten zu erzeugen, als wäre der Flug mit 5 separaten Kameras aufgenommen wäre. Die fünf Flugrouten entsprechen fünf Kamerarichtungen, nach unten, nach vorne, nach hinten, nach links und nach rechts.
- 3.Wie plane ich Flugrouten, wenn keine Internetverbindung zur Verfügung steht und die Karte daher nicht lädt?
Sollten Sie Zugang zu einem Mobilgerät mit Internetverbindung haben, aktivieren Sie Tethering und verbinden darüber Ihren Computer mit dem Internet.
Sollten Sie vor Ort keinen Internetzugang haben, können Sie die Flugroute vorab, bei bestehender Internetverbindung, planen oder alternativ die Grenzen des zu befliegenden Gebiets manuell abfliegen, um sie festzulegen und basierend darauf die Flugroute zu planen.
- 4.Was beschreibt die Ground Sample Distance (GSD)?
In der Photogrammetrie und Fernerkundung beschreibt die GSD (Ground Sample Distance bzw. Bodenpixelgröße) eines Orthofotos den tatsächlichen Abstand zwischen zwei Pixeln auf dem Boden. Die Einheit ist Zentimeter / Pixel.
- 5.Was bedeutet relative Höhe in den erweiterten Einstellungen im Kartierungseinsatz-Fenster? Wie unterscheidet sich diese von der Einsatzflughöhe in den Grundeinstellungen?
Die relative Einsatzhöhe in den erweiterten Einstellungen ist die Höhe des Ortes an dem gestartet wurde, relativ zum erfassten Bereich.
Die Einsatzflughöhe ist die Höhe in relativem Abstand zwischen der Drohne und der Oberfläche des kartierten Gebiets. Auf Basis dieser Höhe wird die Bodenauflösung (GSD) berechnet.
- 6.In welchen Fällen muss ich die Relative Einsatzhöhe in den erweiterten Einstellungen anpassen?
Sollte es einen großen Unterschied zwischen der Höhe des Startorts und des Einsatzgebiets geben, können Sie die relative Höhe in den erweiterten Einstellungen anpassen und somit gewährleisten, dass die Einsatzflughöhe der tatsächlichen Höhe des Kartierungsgebiets entspricht.
Beachten Sie dazu auch folgende Abbildung: Wenn die Drohne von einem 50 m hohen Gebäude „H1“ starte, das Kartierungsgebiet mit „A“ markiert ist und die vorhergesehene Flughöhe für die Datenerfassung aus der Luft 100 m beträgt, dann sollten Sie in den Grundeinstellungen die Einsatzflughöhe auf 100 m und in den erweiterten Einstellungen die relative Einsatzhöhe auf 50 m festlegen.
Ähnlich verhält es sich, wenn die Drohne von „H2“ aus das Gebiet „B“ kartografiert, welches ein Hügel mit einer Höhe von 40 m ist, und die vorhergesehene Flughöhe für die Datenerfassung aus der Luft 60 m beträgt. Stellen Sie hierzu die Einsatzflughöhe auf 60 m und die relative Einsatzhöhe auf -40 m ein.
- 7.Was muss ich machen, damit die Genauigkeit in meinen Aufträgen mit einer Phantom 4 RTK sichergestellt ist?
1) Führen Sie Ihre Aufträge nur bei klaren Wetterbedingungen mit guter Sichtweite durch.
2) Überprüfen Sie die Fotos und Videos, direkt nach Abschluss des Auftrags, auf korrekte Helligkeit und Schärfe.
3) Vermeiden Sie während eines Vermessungsauftrags Bereiche mit starken elektromagnetischen Störungen oder Hindernissen, um die Genauigkeit des Ausrichtungsalgorithmus der Phantom 4 RTK sicherzustellen. Stellen Sie außerdem sicher, dass die Fernsteuerung ordnungsgemäß mit dem Fluggerät verbunden ist.
4) Sorgen Sie zudem für eine ausreichende Überlappung nach vorne und seitwärts. Wir empfehlen eine Überlappungsrate von 80 % nach vorne und 70 % seitwärts. Die Überlappungsraten können je nach Gelände angepasst werden.
- 8.Wann muss ich die Überlappungsrate aufgrund besonderer Geländeeigenschaften anpassen?
Wir empfehlen eine Überlappungsrate von 80 % nach vorne und 70 % seitwärts. Diese Einstellungen sind für die meisten Szenarien ausreichend. Stellen Sie bei einem Auftrag mit einer großen Varianz in der relativen Höhe des Kartierungsgebiets sicher, dass bei Aufnahme des höchsten Punkts (d. h. der Punkt mit dem geringsten Abstand zwischen Fluggerät und Oberfläche) noch genügend Überlappung besteht, ohne das Lücken aufgrund des geringen Abstands entstehen. Weist das kartierende Gebiet einen geringen Höhenunterschied auf, kann die Überlappungsrate auf einen geringeren Prozentsatz gesetzt werden, um die Menge der zu verarbeitenden Daten zu verringern. Dies sorgt für noch effizientere Kartierungsaufträge. Wir empfehlen jedoch stets die Überlappungsrate nach vorne auf über 65 % und jene zur Seite bei mindestens 60 % zu setzen.
- 9.Wenn ich DJI Terra mit meiner Phantom 4 RTK verbinde, teilt mir die App mit, dass ich aufgrund des zu schwachen RTK-Signals nicht abheben kann. Was kann ich tun?
Eine Ursache könnte sein, dass im Fluggebiet Störungen oder andere Hindernisse zu einem schlechten RTK-Signal führen. Versuchen Sie zunächst das RTK-Modul zu deaktivieren und den Flug nur mit GNSS zu beginnen. Nachdem die Drohne eine Flughöhe mit geringeren Interferenzen erreicht hat, aktivieren Sie das RTK-Modul und verbinden die Drohne mit DJI Terra, um den Auftrag durchzuführen.
- 10.Welche Fluggeräte unterstützen Echtzeit-3D-Kartierung?
P4 RTK (Fernsteuerung), P4P V2.0, P4P + V2.0. Hinweis: In Umgebungen ohne RTK-Signale, sind 3D-Modelle möglicherweise von schlechter Qualität oder gar nicht verfügbar.
- 11.Kann ich Flugrouten für Wegpunkteinsätze oder Detailinspektionen planen, die auf Echtzeit-3D-Modellen basieren?
Ja.
- Detaillierte Inspektion
- 1.Welche Fluggerätmodelle werden mit detaillierter Inspektion und Planung der Flugroute unterstützt?
P4 RTK (NO-MONITOR RC), Matrice 300 RTK + Erweiterungen der H20-Serie, Mavic 2 Enterprise Advanced
- 2.Können Punktwolken-Dateien Dritter in die DJI Terra importiert werden?
Ja, LAS-Punktwolken-Dateien können importiert werden.
- 3.Kann eine LAS-Punktwolken-Datei Dritter importiert werden, wenn diese kein Koordinatensystem beinhaltet?
Ja. Sie müssen das Koordinatensystem einstellen, wenn Sie die Datei erstmalig importieren. Verwendet die Datei ein beliebiges Koordinatensystem, dann müssen Sie es korrigieren. Verwenden Sie dazu eine Punktwolkenkorrektur-Software eines Dritten.
- 4.Können detaillierte Inspektionseinsätze durchgeführt werden, wenn das Fluggerät auf Einsatz-Flughöhe geflogen wird?
Nein, das Fluggerät muss in absoluter Flughöhe geflogen werden.
- 5.Was sind die wichtigen Punkte, die man bei der Planung oder Ausführung eines detaillierten Inspektionseinsatzes beachten muss?
1. Stellen Sie bei der Planung und Durchführung einer Flugroute sicher, dass die RTK-Datenquellen konsistent sind.
2. Flugrouten können nur ausgeführt werden, wenn sich RTK in „FIX“-Status befindet. Sie können während der Ausführung den ersten Wegpunkt als Inspektionspunkt im Schwebeflug einstellen. Der Einsatz muss gestoppt werden, wenn der Ort des Inspektionspunktes falsch ist.
- Rekonstruktionsmodelle erstellen
- 1.Die Echtzeit-Rekonstruktion generierte keine Karte oder generierte nur einen Teil der älteren Karte.
Überprüfen Sie zuerst, ob sich die Anzahl der übertragenen Bilder wesentlich von der Anzahl der aufgenommenen Bilder unterscheidet. Wenn kein Unterschied besteht, dann können Sie das Protokoll überprüfen, um zu sehen, ob die Meldung „Erneute Lokalisierung fehlgeschlagen“ angezeigt wird. Ist dies der Fall, dann müssen Sie nach Bedarf die Einsatz-Flughöhe erhöhen, um den Überlagerungsgrad zu verbessern.
- 2.Für was stehen die Szenarios Flur (Field), Stadt (Urban), und Obstanbau (Fruit Tree) in der 2D-Karte?
Das Szenario Flur dient für Aufträge über flachem Land, wie zum Beispiel einem Getreideacker.
Das Szenario Stadt dient für Aufträge über Gebieten mit mehreren Gebäuden unterschiedlicher Höhe.
Das Szenario Obstanbau dient für Gelände mit vielen Höhenunterschieden und nicht einheitlichem Bewuchs.
Die 2D-Kartierungsalgorithmen wurden speziell auf diese drei Szenarien angepasst, wählen Sie daher das Szenario, welches am ehesten dem tatsächlichen Auftrag entspricht.
- 3.Ein großer schwarzer Bereich erscheint auf einer Karte, die mit 2D-Rekonstruktion generiert wurde.
1. Der Bug des Fluggeräts drehte sich während der Datenerfassung nicht herum und der intrinsische Parameter „cx“ oder „cy“ des Fluggeräts wird im Aerotriangulation-Qualitätsbericht als >5 % statt als die halbe Länge und Breite des Bildes angezeigt;
2. Die Orte befinden sich in einem kontrastreichen Gelände, wobei Dächer oder Hügelkuppen in den Bildaufnahmen festgehalten wurden, was zu einem niedrigen Überlagerungsgrad führte. Sie können die Bilder nach Bedarf erneut aufnehmen.
- 4.Die Umrisse des Gebäudes in einer mit 2D-Rekonstruktion generierten Karte sind verzerrt.
1. Der Überlagerungsgrad ist zu niedrig. Sie können die Bilder nach Bedarf erneut aufnehmen.
2. Stellen Sie sicher, dass „Urban“ als Rekonstruktions-Szenario ausgewählt ist.
- 5.Wie erhalte ich die TFW-Dateien, die den digitalen Orthophotokarten (DOM) und den digitalen Oberflächenmodellen (DSM) entsprechen?
Wenn die Rekonstruktion abgeschlossen ist, werden automatisch TFW- und PRJ-Dateien im Stammverzeichnis des entsprechenden Missionsordners erstellt.
- 6.Kann ich mit Schrägaufnahmen eine 2D-Rekonstruktion erstellen?
Nein.
- 7.Warum besteht eine große Diskrepanz zwischen der Höhe im digitalen Geländemodell (DSM) der 2D-Karte, welche mit DJI Terra erzeugt wurde und der tatsächlichen Höhe, welche mit RTK aufgenommen wurde?
Ortsinformationen von Luftbildern, welche durch eine Drohne ohne RTK aufgenommenen wurden, sind nur in einem gewissen Umfang genau. Dies führt zu Unterschieden zwischen der tatsächlichen Höhe und der Höhe in im digitalen Geländemodell.
Bei der Durchführung von Aufträgen mit der Phantom 4 RTK muss beachtet werden, dass wenn die 2D-Karte nur mit Fotos aus Nadir-Richtung (d. h. nach unten) aufgenommen wurden, ist auch bei Verwendung von RTK nur eine beschränkte Genauigkeit gegeben. Wir empfehlen daher die Aufnahme von Schrägluftbildern, um die Genauigkeit der Karte zu erhöhen. Dies kann durch die Neigung des Gimbals auf -45° und die Umkreisung des Zielmotivs während des Fluges erreicht werden.
- 8.Wie unterschiedlich sind die 3D-Modelle bei unterschiedlichen Aufnahmen? Wie viel Zeit wird für die Erstellung eines Modells bei diesen Auflösungen benötigt?
Es gibt drei Optionen zur Rekonstruktionsauflösung: Hoch (High) erzeugt ein Modell mit voller Auflösung, Mittel (Medium) ein Modell mit halber Auflösung und Gering (Low) ein Modell mit einem Viertel der ursprünglichen Auflösung. Je höher die Auflösung, desto besser ist die Qualität des Rekonstruktionsmodells. Das Verhältnis des Zeitaufwands für die Rekonstruktion beträgt für Hoch:Mittel:Gering etwa 16:4:1.
- 9.Kann DJI Terra 2D- und 3D-Modelle zuschneiden?
Die Funktion Region von Interesse (ROI) ist verfügbar. Nach Abschluss der Triangulation aus der Luft kann die Rekonstruktionsfläche angegeben werden.
- 10.Warum gibt es Lücken im Modell? Welche Faktoren haben einen Einfluss auf die Qualität der Rekonstruktion?
Lücken können aufgrund von fehlenden Bildern oder Aufnahmen aus ungünstigen Winkeln auftreten. Die Qualität der Rekonstruktion kann durch verschiedene Faktoren negativ beeinflusst werden, wie etwa reflektierende Oberflächen (z. B. Wasser oder Glas) oder Oberflächen mit einheitlicher Farbe und wiederholenden Mustern.
- 11.Was sollte ich beachten, wenn ich Rekonstruktionen aus Aufnahmen einer Schrägkamera-Anordnung erstelle?
Sie müssen die Kameraparameter für jede der fünf Kameras festlegen. Die aufgenommenen Fotos werden in fünf Ordnern gespeichert, die den einzelnen Objektiven entsprechen.
Wählen Sie alle Fotos in einem Ordner aus, klicken Sie mit der rechten Maustaste und gehen Sie zu Eigenschaften. Klicken Sie dann auf Details, scrollen Sie nach unten zu Kameramodell, doppelklicken Sie auf das Parameterfeld auf der rechten Seite, um in den Bearbeitungsmodus zu gelangen und geben Sie Ziffern oder Buchstaben ein. Tun Sie dies in allen fünf Ordnern für die fünf Kameras. Jede Kamera sollte einen eigenen Namen erhalten, wie z. B. 1, 2, 3, 4, 5 oder A, B, C, D, E.
- 12.Das ganze Gebäude in einer mit 3D-Rekonstruktion generierten Karte neigt sich zu einer Seite.
Der Bug des Fluggeräts drehte sich während der Datenerfassung nicht herum und der intrinsische Parameter „cx“ oder „cy“ des Fluggeräts wird im Aerotriangulation-Qualitätsbericht als >5 % statt als die halbe Länge und Breite des Bildes angezeigt.
- 13.Die Beschaffenheit der Fassade des Gebäudes in einem mit 3D-Rekonstruktion generiertem Bild ist unscharf.
Die betitelten Aufnahmen fehlen. Sie können die Bilder nach Bedarf erneut aufnehmen.
- 14.Sich wiederholende Muster von Flecken erscheinen auf einem mit 2D- und 3D-Rekonstruktion generierten Kartenresultat.
Die Flecken können auf Schäden an Ihrer SD-Karte oder Kamera beruhen.
- 15.Warum ist die Aerotriangulation fehlgeschlagen oder warum habe ich eine große Anzahl von Fotos verloren?
1. Es kann sein, dass nicht genügend RAM zur Verfügung steht. Derzeit beträgt die Verarbeitungsgeschwindigkeit ungefähr 300-400 Bilder/G. Teilen Sie die Anzahl der importierten Bilder durch 300 und sehen Sie, ob das Ergebnis größer als der aktuell verfügbare RAM ist.
2. Der Überlagerungsgrad der Bilder ist zu niedrig. Wurde der Überlagerungsgrad an einen niedrigeren Wert angepasst? Gab es wesentliche Flughöhenänderungen? Der Überlagerungsgrad muss eventuell für Bereiche mit größeren Flughöhenänderungen erhöht werden.
3. Die Beschaffenheit von Objekten wird in den Bildern nicht festgehalten. Überbelichtung von Wasseroberflächen, weiße Wände, der Himmel, schneebedeckter Boden, Stadien oder andere große Strukturen unter der Sonne;
4. Sich wiederholende Beschaffenheit: Reisfelder, Solaranlagen, Bodenfliesen usw.;
5. Eine große Anzahl von Objekten bewegten sich: Menschenmengen, Fahrzeugströme, Meereswellen usw.;
6. Ein im Bild erfasster großer Bereich umfasst Objekte, die nicht aus diffus reflektierenden Materialien hergestellt sind: Spiegel, Glass, reflektierende Oberflächen von Autos usw.
7. Die Bildwinkel sind von Bild zu Bild verschieden (Oblique System mit 5 Kameras). Das Bild mit Draufsicht wurde rekonstruiert, aber die meisten Bilder mit geneigtem Winkel sind verloren;
8. Probleme mit der Bildqualität: Verzerrte Bewegungen; fehlender Fokus, Überbelichtung usw.
9. Fehlende Kontinuität in den Bildern, fehlende Aufnahmen oder mehrere importierte Datensätze treffen nicht auf denselben Bereich zu.
- 16.Was kann ich tun, um eine fehlgeschlagene Aerotriangulation zu retten oder die verlorenen Fotos wiederherzustellen?
1. Importieren Sie die Bilder in die DJI Terra und überprüfen Sie die entsprechenden 2D-Orte auf der Karte.
- Mehrere Einsätze können erstellt werden, um die Bilder separat zu rekonstruieren, wenn diese nicht überlagerungsfrei sind. Die Bilder können übersichtlich in Serien kategorisiert werden
- Sie können zusätzliche Bilder aufnehmen, um eventuell fehlende Aufnahmen nachzuholen
2. Die 2D-Orte der Bilder sind überlagerungsfrei und zeigen keine erkennbaren Lücken.
- Die Erfolgsrate der Rekonstruktion ist hinsichtlich Bilder mit großen Gewässern relativ niedrig, wie z. B. Ozeane, während Sie bei Flüssen und Seen Ihre Einsatz-Flughöhe erhöhen und dabei sicherstellen müssen, dass nur 1/3 des Bildes eine Wasseroberfläche zeigt
- Sie können die Bilder erneut aufnehmen, wenn sich die Orte in Hügellandschaften befinden und der Überlagerungsgrad kleiner als 60 % ist. Sie müssen das Fluggerät in einer höheren Flughöhe fliegen und einen ausreichenden Überlagerungsgrad sicherstellen
3. Daten wurden während mehrerer Trips aufgezeichnet und der Überlagerungsgrad zwischen den Trips ist ausreichend. Einige Trips erscheinen nicht in der Rekonstruktion, obwohl jeder Trip einzeln rekonstruiert werden kann.
- Die Lichtverhältnisse dürfen in den Umgebungen, in denen Daten erfasst wurden, nicht zu unterschiedlich sein. Wenn einige Trips am Morgen und andere am Nachmittag aufgezeichnet wurden, dann kann es sein, dass die Software die Daten von verschiedenen Trips aufgrund von wesentlichen Helligkeitsunterschieden nicht zusammenführen kann
- 17.Die Beschaffenheit eines Glasbaus ist verzerrt oder Löcher erscheinen auf reflektierenden Objekten, wie z. B. auf Autos oder an weißen Wänden oder auf Oberflächen von Seen.
1. Glas und Oberflächen von Autos sind nicht aus diffus reflektierenden Materialien hergestellt. Sie können die Bilder aus einer größeren Entfernung aufnehmen.
2. Weiße Wände und Wasseroberflächen von Seen weisen keine Beschaffenheit auf. Sie können die Bilder aus einer größeren Entfernung aufnehmen.
- 18.Welche Dateiformate lassen sich aus den 2D-Karten und 3D-Modellen in DJI Terra exportieren?
2D-Rekonstruktionen:
Die Ergebnisse enthalten in der Benutzeroberfläche der App angezeigte Kartenkacheln, digitale orthofotografische Karten und digitale Oberflächenmodelle im GeoTIFF-Format, welches für UTM-Projektionen verwendet wird.
3D-Rekonstruktionen:
Die Ergebnisse enthalten ein Detailstufenmodell im Format .osgb, .b3dm oder .s3mb, ein Texturgitter im Format .ply oder .obj, eine Punktwolke im Format .pnts, .las oder .s3mb sowie eine Aerotriangulations-Ergebnisdatei im Format .xml oder in Terras eigenem Format.
- 19.Welche Genauigkeit bieten die 2D- und 3D-Modelle, welche mit der Phantom 4 RTK aufgenommen wurden?
Beim Einsatz der Phantom 4 RTK liegt die absolute Genauigkeit, der in DJI Terra erzeugten 2D-Karten, bei etwa dem Ein- bis Zweifachen der GSD. Dieser Wert ist vergleichbar mit der Genauigkeit anderer Datenverarbeitungssysteme. Bei einem Flug auf 100 Metern Höhe liegt die absolute horizontale Genauigkeit der 2D-Karte bei zwei bis fünf Zentimetern, die absolute Genauigkeit der 3D-Modelle liegt bei vier Zentimetern.
- 20.Welche Variablen wirken sich auf die Genauigkeit der 2D- und 3D-Rekonstruktionen in DJI Terra aus?
Die Genauigkeit der Rekonstruktion kann durch weitere Faktoren beeinflusst werden, wie etwa der Kameraverzeichnung, der Flughöhe, der Überlappung zur Seite und nach vorne, der GPS/RTK-Genauigkeit und den Informationen über die Textur des Zielobjekts.
- 21.Wie kann ich die Ergebnisse und Dateien der Ergebnisse der Triangulation aus der Luft, 2D-Karten und 3D-Punktwolken oder -modelle anzeigen lassen?
Klicken Sie in jedem Auftrag auf „More“ und öffnen die Ordner, in welchen die ausgegebenen Dateien der Aufträge abgelegt werden. Die Ergebnisse der Triangulation aus der Luft sind unter „AT“ gespeichert, 2D-Karten unter „Karte“ und 3D-Punktwolke oder -modell unter „Modelle“.
Log-Dateien der Rekonstruktionsaufträge können Sie mit Einzelberechnung mit der Tastenkombination Ctrl + Alt + L anzeigen lassen.
- 22.Kann ich mehrere Aufträge von einem Computer ausführen?
Aufgrund beschränkter Systemressourcen können derzeit keine parallelen Rekonstruktionsaufträge zeitgleich ausgeführt werden. Die Aufträge werden nacheinander abgearbeitet.
- 23.Während der Rekonstruktion erscheint ein Popup-Fenster mit der Meldung „Kann den Code nicht weiter ausführen, da OpenCL.dll nicht gefunden werden konnte. Eine Neuinstallation des Programms könnte dieses Problem beheben. “ - Was soll ich tun?
Bitte aktualisieren Sie den GPU-Treiber.
- 24.Warum hängt mein Computer, wenn ich die aufgenommenen Bilder zur Rekonstruktion lokal verarbeite? Kann ich DJI Terra gleichzeitig mit anderen Programmen ausführen?
Damit Rekonstruktionsmodelle so schnell wie möglich erzeugt werden, nutzt DJI Terra alle zur Verfügung stehenden Systemressourcen (Prozessor, Arbeitsspeicher, Grafikkarte (GPU und Speicher). Daher sind andere Funktionen des Computers, während der Berechnung in DJI Terra, möglicherweise langsamer.
Wir empfehlen daher während der Nutzung von DJI Terra keine weiteren GPU-Intensiven Programme auszuführen, welche die Erstellung der Rekonstruktion behindern.
- 25.Unterstütz DJI Terra die Rekonstruktion der Regionen von Interesse?
Ja. Nach Durchführung einer Aerotriangulation können Sie Ihre Region von Interesse einstellen und die Rekonstruktion starten.
- 26.Bestehen irgendwelche Anforderungen für das Importieren von .prj-Dateien in die DJI Terra?
Um das Importieren einer .prj-Datei in die DJI Terra zu ermöglichen, müssen Sie sicherstellen, dass die Datei ein Esri-unterstütztes Format befolgt. Die Projektion der Datei oder die Koordinaten-Rahmendaten werden in WKT-Zeichenfolgen beschrieben.
- 27.Warum habe ich die folgende Fehlermeldung erhalten: „Fehler beim Lesen der JSON-Datei“
1. Ein Wert für horizontale und vertikale Genauigkeit in den POS-Daten Ihrer importierten Bilder ist 0;
2. Die horizontale und vertikale Genauigkeit für das GCP-Bild ist auf 0 eingestellt. (Wir empfehlen eine Aktualisierung mit Version 2.2.1 und später. Diese Version verfügt über einen automatischen Fehlertoleranzmechanismus).
- 28.Kann ich nach Fertigstellung der 3D-Rekonstruktion ein Ausgabeformat hinzufügen?
Ja, nach Fertigstellung der 3D-Rekonstruktion kannst du mit der Rekonstruktion fortfahren, indem du das erforderliche Ausgabeformat prüfst.
- 29.Unterstützt die Stadtszene der 2D-Karte die Ausgabe des komprimierten DSM?
Ja. GSD ist 5m/px
- Ausgegebenes Koordinatensystem
- 1.Welchen Zweck hat die Festlegung des ausgegebenen Koordinatensystems?
Die folgenden Rekonstruktionsergebnisse können nur in bestimmen Koordinatensystemen erreicht werden.
Triangulation aus der Luft: Eine Datei zum Ergebnis der Triangulation aus der Luft in .xml
2D-Rekonstruktion: dsm.tif, result.tif
3D-Rekonstruktion: Punktwolkendateien (.las, .ply, .pcd, .s3mb) und Modelldateien (.osgb, .ply, .obj, .s3mb, .i3s) werden von der Koordinatensystem-Anweisungsdatei metadata.xml begleitet.
- 2.Warum wird nach dem Festlegen des Ausgabekoordinatensystems und einem Klick auf "Rekonstruieren" ein "Ausgabekoordinatensystem-Fehler" angezeigt?
Dieser Fehler wird angezeigt, wenn die Rekonstruktionsergebnisse nicht in das angegebene Koordinatensystem konvertiert werden können. Das Ausgabekoordinatensystem hat mit GPS-Informationen auf den Bildern und dem Koordinatensystem zu tun, in dem sich die GCPs befinden. Hier sind einige Szenarien, die Sie möglicherweise berücksichtigen möchten:
(1) Lufttriangulation ohne GCPs

(2) Mit GCPs optimierte Lufttriangulation

- Passpunkte (GCPs)
- 1.Was sind Passpunkte? Wie erhalte ich Passpunkte?
Passpunkte sind markierte Punkte auf dem Boden, welche über bekannte Koordinaten verfügen und deutlich in einer Aufnahme wahrnehmbar sind. GCP können über photogrammetrische Methoden wie GPS/RTK oder mit einem Tachymeter erfasst werden.
- 2.Warum sollte ich Passpunkte verwenden?
Die Passpunkte verbessern die Robustheit und Genauigkeit der Aerotriangulation, überprüfen Sie sie Genauigkeit der Aerotriangulation gegenüber den tatsächlichen Messungen und bestimmen Sie die absolute Orientierung durch die Konvertierung des Ergebnisses der Aerotriangulation Passpunkte des gewünschten Koordinatensystems.
- 3.Was sollte ich beachten, wenn ich GCP-Dateien importiere?
Die Daten der Passpunkte sollten in dieser Reihenfolge gespeichert sein:
Punktname, Breitengrad/X, Längengrad/Y, Höhe/Z, horizontale Genauigkeit, vertikale Genauigkeit). Die Daten zur Genauigkeit sind optional. Die erste Zeile sind die Daten für die Koordinaten, jede Spalte ist über ein Leerzeichen oder Tab getrennt. Im projizierten Koordinatensystem steht X für Osten und Y für Norden.
- 4.Welche Unterschiede bestehen zwischen Passpunkten und Festpunkten?
Die Passpunkte werden zur Optimierung des Ergebnisses der Aerotriangulation verwendet. Es werden zumindest drei Passpunkte benötigt, um die absolute Orientierung der Aerotriangulation sicherzustellen.
Festpunkte können für die absolute Genauigkeit der Aerotriangulation verwendet werden, indem die Fehlerabweichung zwischen dem berechneten Ergebnis der Aerotriangulation mit den tatsächlichen Messungen verglichen wird.
Wir empfehlen mindestens vier Passpunkte im Zielgebiet zur Berechnung zu verwenden.
Bei genügend verfügbaren Passpunkten können einige von diesen auch als Festpunkte zur Überprüfung der Genauigkeit verwendet werden.
- 5.Wie genau sollten die Passpunkte sein?
Die Werte der Passpunkte aus der Aerotriangulation und ihre Genauigkeit sollte mit der Endgültig benötigten Genauigkeit übereinstimmen, welche Sie von Ihrem Projekt erwarten.
Umso geringer die Einstellungen für die Genauigkeit sind, desto mehr Gewicht erhalten die Passpunkte im Triangulationsmodell.
- 6.Was ist ein Passpunkt-Reprojektionsfehler?
Bei der Berechnung eines Punktes bei dem in zwei Fotos Passpunkte markiert wurden, werden die 3D-Koordinaten berechnet und auf alle Fotos projiziert in denen dieser Punkt abgebildet ist. Der Unterschied zwischen dem markierten Punkt und dem projizierten Punkt auf dem Foto wird als Reprojektionsfehler bezeichnet. Der Durchschnitt unterschiedlicher Reprojektionsfehler wird in DJI Terra als Reprojektionsfehler angezeigt.
- 7.Was ist ein Passpunkt-3D-Fehler?
Der 3D-Fehler eines Passpunkts bezeichnet den räumlichen Unterschied zwischen den gemessenen Koordinaten und den 3D-Koordinaten, welche durch einen räumlichen Verschnitt aus den internen und externen Orientierungen des Fotos erhalten wurden.
- 8.Welche Möglichkeiten gibt es das Ergebnis nach der Markierung der Passpunkte zu optimieren?
Wir nehmen an, dass das Koordinatensystem aus dem die Luftbildaufnahmen und die Passpunkte gewonnen wurden, mit DJI Terra transformierbar ist, d.h. die Aufnahmen und die Passpunkte verwenden das Gleiche geodätische Datum für das Koordinatensystem:
a) Für Aufnahmen mit besonders hoher Genauigkeit, etwa wenn diese mit einer Phantom 4 RTK erfasst wurden, sind die Passpunktprojektionen nur in geringem Maße abweichend von den tatsächlichen Ergebnissen. Markieren Sie die Passpunkte mit einer Referenz zu den projizierten Ergebnissen im Bild, klicken Sie dann auf „Aerotriangulation“ auf dem Bildschirm.
b) Für Aufnahmen mit einer geringen Genauigkeit, können Sie die Aerotriangulation zunächst mit den importierten Aufnahmen durchführen, welche über GPS-Informationen verfügen und importieren dann die gemessenen Koordinaten der Passpunkte. Nach der ersten Triangulation können Sie mit der Markierung der Passpunkte fortfahren und über „optimize“ die Darstellung optimieren.
- 9.Welcher Unterschied besteht zwischen Aerotriangulation und -optimierung?
Die Optimierung dient der Verbesserung der Aerotriangulation. Sollte eine Triangulation direkt nach der Markierung der Passpunkte durchgeführt werden, werden Festpunkte auch für die Berechnung verwendet, dieser Fall ist nicht optimal. Eine bessere Vorgehensweise wäre: AerotriangulationGeben Sie die Passpunktkoordinaten ein und markieren Sie diese entsprechend an den projizierten Koordinaten in der AufnahmeOptimierung. Durch diese Methode können Passpunkte die Genauigkeit der Aerotriangulation verbessern.
- 10.Ich habe sämtliche Aufnahmen importiert und befinde mich nun auf der Seite „GCP Management“, warum sehe ich keine Informationen zur Position und der Ausrichtung?
Stellen Sie sicher, dass die Position und die Ausrichtung der importieren Aufnahmen korrekt ist.
- 11.Warum wird die Kameraausrichtung und -position, nach dem Import nicht an der korrekten Stelle angezeigt?
Stellen Sie sicher, dass die Positions- und Ausrichtungsinformationen korrekt sind und wählen Sie das gleiche Koordinatensystem aus, wie das der Passpunkte.
- 12.Warum ist die Genauigkeit der Festpunkte geringer nachdem Sie diese unter Zuhilfenahme der Passpunkte optimiert haben?
Die Genauigkeit der Aerotriangulation und Optimierung wird von drei Faktoren beeinflusst: Fehler in der Markierung von Passpunkten, Fehler in der Koordinatenmessung und der Verteilung und Anzahl der Passpunkte innerhalb des kartierten Gebiets.
Wir empfehlen mindestens vier gleichmäßig verteile Passpunkte innerhalb der Zielbereichs zu verwenden. Jeder Passpunkt sollte in mindestens vier Aufnahmen an unterschiedlichen Stellen auftreten. Darüber hinaus sollten diese sich nicht am Rand des Bildes befinden.
- 13.Unterstützt DJI Terra die Verarbeitung von Passpunkten für Aufnahmen, welche mit anderen Drohnen von DJI aufgenommen wurden?
Ja.
- 14.Ich habe GCPs importiert. Warum erscheinen diese dann nicht in der Aerotriangulation?
1. Die Koordinatensysteme stimmen nicht überein. Achten Sie darauf, dass das Koordinatensystem der GCPs mit dem der ausgewählten GCPs übereinstimmt und das Koordinatensystem der importierten POS-Daten mit den ausgewählten POS-Daten übereinstimmt.
2. Die Koordinatensysteme können nicht von einem zum anderen konvertiert werden. Vergewissern Sie sich, dass sich das Koordinatensystem der Bild-POS-Daten in das Koordinatensystem der GCPs konvertieren lässt. Falls nicht, konvertieren Sie die Koordinatensysteme bitte mit einem Drittanbieter-Softwareprogramm.
3. Höhenfehler. Prüfen Sie die Höhenunterschiede zwischen den Koordinatensystemen der importierten POS-Daten und der GCPs. Falls Sie Fehler feststellen, korrigieren Sie diese in den POS-Dateneinstellungen.
- POS-Daten
- 1.Wann muss ich POS-Daten importieren?
1. Wenn Sie Ergebnisse in einem bestimmten Höhen- oder Koordinatensystem (z. B. einem lokalen Höhen- oder Koordinatensystem, das ggf. nicht in der bestehenden Datenbank von Terra enthalten ist) ohne GCPs erfassen möchten.
2. Wenn Sie POS-Daten und GCPs im selben Höhen- oder Koordinatensystem verarbeiten möchten, müssen Sie unter Umständen POS-Daten und GCP-Daten importieren, die bereits in jenes System konvertiert wurden.
- 2.Wie stelle ich das Koordinatensystem und den Höhenfehler der POS-Daten ein?
Die Einstellung des Koordinatensystem der POS-Daten muss dem tatsächlich in die Daten geschriebenen Koordinatensystem entsprechen. Etwaige Höhenfehler müssen in den Einstellungen korrigiert werden. Sie können sich eine Vorschau der Höhenwerte anzeigen lassen, sobald Sie alle POS-Importeinstellungen angepasst haben.
- 3.Was sollte ich bei der Einstellung der Genauigkeit der POS-Daten beachten?
1. Auf DJI Terra-Standardgenauigkeit einstellen. Wenn die Bilder RTK-Daten enthalten und diese fixiert sind, liest DJI Terra diese Daten automatisch und stellt die Genauigkeit wie folgt ein: horizontale Genauigkeit auf 0,03 m, Höhengenauigkeit auf 0,06 m. Wenn keine RTK-Daten vorliegen oder falls diese nicht fixiert sind, wird die horizontale Genauigkeit auf 2 m und die vertikale Genauigkeit auf 10 m eingestellt.
2. Genauigkeitswerte manuell festlegen. Bearbeiten Sie die horizontalen und vertikalen Genauigkeitswerte in den POS-Dateien und wählen Sie die entsprechende Spalte in den POS-Importeinstellungen aus.
- 4.Was passiert bei der Berechnung der Aerotriangulation, wenn einige der Bilder keine POS-Daten enthalten?
Diese Bilder werden nicht in die Berechnungen der Aerotriangulation einbezogen.
- 5.Sollte ich für die Bildverarbeitung während der Aerotriangulation POS-Einschränkung einschalten?
Im Allgemeinen sollten Sie diese eingeschaltet lassen, aber wenn die Bild-POS-Daten und die GCPs nicht im selben Höhensystem liegen, schalten Sie sie aus.
- Kartenraster
- 1.Welche Form hat das Ergebnis der Ausgabe des Kartenrasters?
Quadrat
- 2.Sind sowohl DOM- als auch DSM-Ergebnisse unterteilt?
Ja
- 3.Wird das Ergebnis der Ausgabe des Kartenrasters die ursprüngliche DOM bzw. das ursprüngliche DSM ersetzen?
Nein, das Ergebnis der Ausgabe des Kartenrasters wird zusätzlich generiert.
- 4.Wo ist der Startposition des Kartenrasters?
Ausgehend von der linken oberen Ecke des Bereichs, der die größte Ausdehnung der 2D-Karte einnimmt, teilen Sie ihn durch die festgelegte Kartengitterlänge, wie in der folgenden Abbildung dargestellt
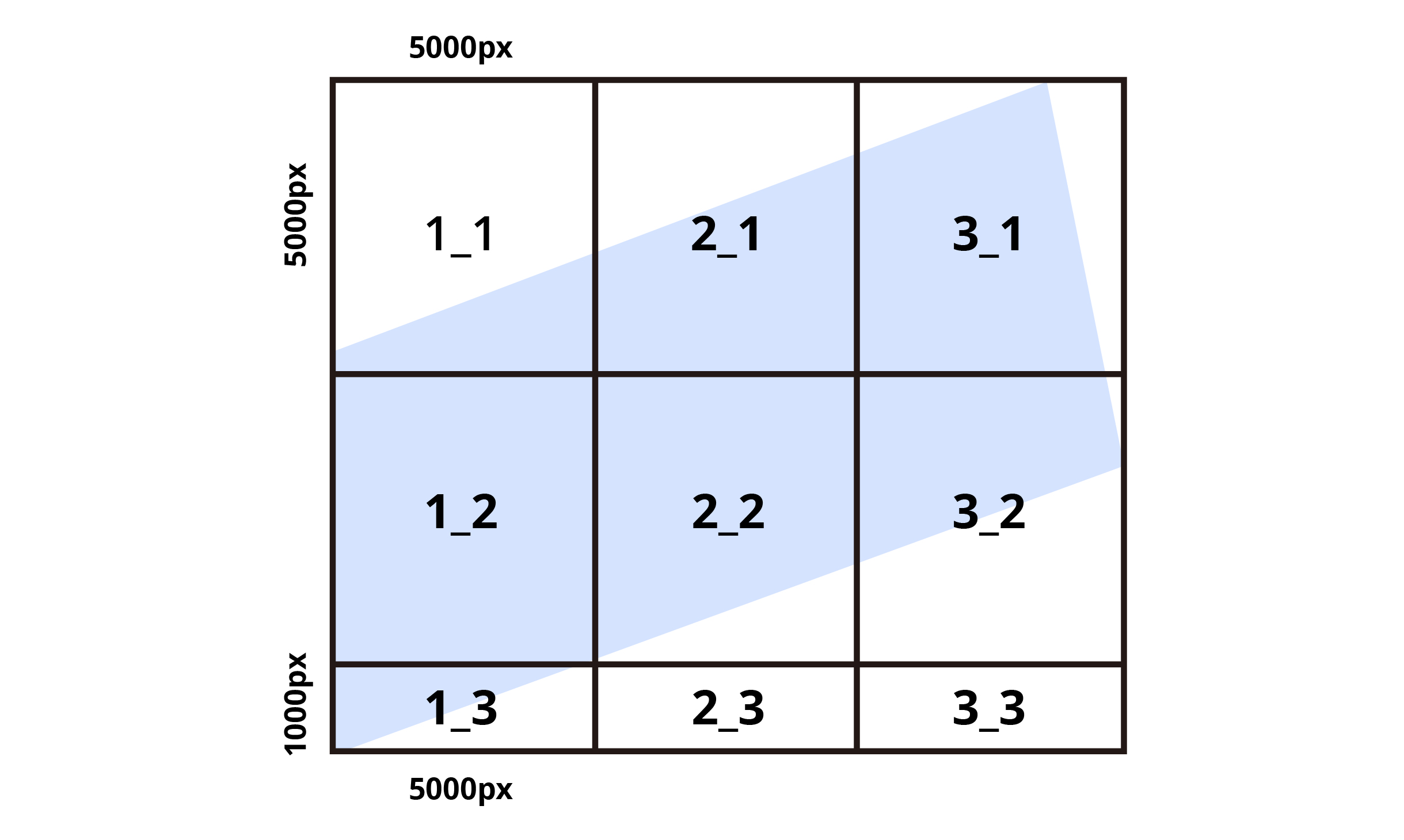
- 5.Wie nennt man das Ergebnis am Ende des Kartenrasters?
Ein Suffix wird dem Namen der Ergebnisdatei hinzugefügt (wie z. B. _1_2), wobei 1 die X-Achse und 2 die Y-Achse repräsentiert.
- 6.Wo wird das Ergebnis der Ausgabe des Kartenrasters gespeichert?
Gespeichert im Einsatzordner:
(1) Name des Einsatzes\map\dsm_tiles
(2) Name des Einsatzes\map\result_tiles
- 7.Enthält das Ergebnis der Ausgabe des Kartenrasters geographische Informationsdateien im PRJ- und TFW-Format?
Ja
- 8.Hat die TIFF-Datei der Ausgabe des Kartenrasters den Parameter BigTIFF?
Das Ergebnis des Kartenrasters hat den BigTIFF-Parameter, wenn seine Größe über 4 GB liegt, das Ergebnis hat keinen solchen Parameter, wenn seine Größe weniger als 4 GB beträgt.
- 9.Welches ist die Mindestlänge des Kartenrasters?
1000 px
- Cluster-Rekonstruktion
- 1.Welche Computerausrüstung wird für eine Cluster-Rekonstruktion benötigt?
Vergleichen Sie hierzu „Preparation Before Using DJI Terra“ auf der Downloadseite.
- 2.Wie kann ich ein lokales Netzwerk (LAN) einrichten?
Vergleichen Sie hierzu „Preparation Before Using DJI Terra“ auf der Downloadseite.
- 3.Wie viele Fotos können höchstens per Cluster-Rekonstruktion verarbeitet werden?
Sie werden durch das Gerät mit dem größten Speicher in dem an der Clusterberechnung beteiligten Gerät bestimmt. (1 GB ungenutzter Speicher kann ca. 6.000 Bilder verarbeiten).
- 4.Was ist ein Steuerungsgerät? Was ist ein Mitarbeitergerät?
Jeder mit einem lokalen Netzwerk verknüpfte Computer ist entweder ein Steuerungs- oder ein Mitarbeitergerät. Ein Steuerungsgerät teilt Rekonstruktionsaufträge zu (und übernimmt auch Teile der Berechnungarbeit), während Rekonstruktionsalgorithmen hauptsächlich auf dem Mitarbeitergerät abgewickelt werden.
- 5.Müssen Steuerungsgeräte mit einer Lizenz ausgestattet werden?
Ja.
- 6.Müssen Mitarbeitergeräte mit einer Lizenz ausgestattet werden? Können Mitarbeitergeräte ausgetauscht werden?
Es ist keine Lizenzbindung erforderlich. Mitarbeitergeräte können nach Bedarf ausgetauscht werden.
- 7.Können Steuerungsgeräte gleichzeitig im gleichen lokalen Netzwerk (LAN) eingeschaltet werden?
Ja.
- 8.Kann die Anzahl an Mitarbeitergeräten erhöht werden, nachdem die Cluster-Version aktiviert wurde?
Ja. Weitere Informationen erhalten Sie bei „Preparation Before Using DJI Terra“.
- 9.Welche Software muss zum Öffnen von Mitarbeitergeräten verwendet werden?
DJI TERRA ENGINE
- 10.Wozu dient ein Geteiltes Verzeichnis?
Dies dient der Speicherung von Originaldaten, vorübergehenden Ausgängen und Rekonstruktionsausgängen.
- 11.Unterstützt Triangulation aus der Luft Cluster-Rekonstruktion?
Ja.
- 12.Kann die Aerotriangulations-Cluster-Berechnung die Geschwindigkeit der Aerotriangulations-Berechnung erhöhen? In welchen Situationen ist die Aerotriangulations-Cluster-Berechnung anwendbar?
1. Wenn die Aerotriangulations-Cluster-Berechnung aktiviert ist, schätzt DJI Terra automatisch die Rechengeschwindigkeit des Einzelnen und des Clusters und wählt die effizientere Option aus. Wenn diese Funktion deaktiviert ist, führt DJI Terra die Rekonstruktion im Einzelberechnungsmodus durch.
2. Es wird empfohlen, die Aerotriangulations-Cluster-Berechnung zu aktivieren, wenn die Anzahl der Fotos 8.000 überschreitet und drei oder mehr Arbeitsgeräte an der Rekonstruktion beteiligt sind.
- 13.Welche Rolle spielt der Parameter „Abstand zum Boden/Zielen“?
1. Nach dem Aerotriangulations-Blocksplitting müssen sich die Blöcke mit einer angemessenen Überlappungsrate teilweise überlappen. Daher muss der Ausdehnungsabstand jedes Blocks eingestellt werden. Die Einstellung dieses Parameters beeinflusst den Dehnungsabstand.
2. Je größer der Blockausdehnungsabstand ist, desto langsamer ist die Aerotriangulationsberechnung. Der Standardwert ist für die meisten Szenarien geeignet.
- 14.Wie viele Fotos können höchstens verarbeitet werden, wenn die Aerotriangulations-Cluster-Berechnung aktiviert ist?
Die Grenze der verarbeiteten Daten wird durch den Speicher des Steuergeräts bestimmt. Im Steuergerät kann 1 GB verfügbarer Speicher verwendet werden, um etwa 6.000 Bilder zu verarbeiten, so dass ein 128-GB-Steuergerät etwa 800.000 Bilder verarbeiten kann.
- 15.Was ist die Grundlage für das Aerotriangulations-Blocksplitting?
DJI Terra führt automatisch ein Aerotriangulations-Blocksplitting basierend auf dem Speicher der an der Rekonstruktion beteiligten Arbeitergeräte durch. Das Arbeitergerät mit dem kleinsten Speicherplatz beeinflusst die Größe der Blöcke (hat jedoch keinen Einfluss auf die Obergrenze für verarbeitete Daten).
- 16.Wie kann ich mir den Arbeitsstatus von Mitarbeitergeräten anzeigen lassen?
Die Liste der Rekonstruktionsaufträge zeigt den Status der Mitarbeitergeräte, die gegenwärtig an der Rekonstruktion beteiligt sind, an.
- 17.Wie wird die Arbeit von Mitarbeitergeräten während der Cluster-Rekonstruktion durch das Steuerungsgerät verteilt?
Triangulation aus der Luft: Wählt automatisch das Mitarbeitergerät mit dem höchsten RAM zur Durchführung der Aufträge zur Triangulation aus der Luft;
Blockrekonstruktion: Übersteigt die Anzahl an Blocks die Anzahl an Mitarbeitergeräten, werden die Mitarbeitergeräte im maximalen Umfang genutzt.
- 18.Kann ein Mitarbeitergerät während der Cluster-Rekonstruktion nach einem Neustart oder einer Freigabe erneut am gegenwärtigen Rekonstruktionsauftrag teilnehmen?
Nein. Damit neugestartete oder freigegebene Mitarbeitergeräte am gegenwärtigen Rekonstruktionsauftrag teilnehmen können, halten Sie den Auftrag an und wählen vor Fortsetzen der Rekonstruktion die Geräte aus.
- 19.Warum ist während der Rekonstruktion der Auslastungsgrad integrierter Grafikkarten auf Mitarbeitergeräten höher als bei diskreten Grafikkarten?
Vorübergehend nicht im Schritt der Verwendung einer diskreten Grafikkarte (integrierte Grafikkarten werden auf DJI Terra nicht zur Berechnung verwendet).
- 20.Nach dem Öffnen der Software erscheint die folgende Eingabeaufforderung: „Die Code-Ausführung kann nicht fortgesetzt werden, da MSVCR120.dll/VCRUNTIME140.dll nicht gefunden werden kann. Eine Neuinstallation des Programms könnte dieses Problem beheben. “
Laden Sie die Anwendung herunter und installieren Sie sie: https://download.microsoft.com/download/2/E/6/2E61CFA4-993B-4DD4-91DA-3737CD5CD6E3/vcredist_x64.exe
- 21.In der Liste lokaler Netzwerkmitarbeitergeräte kann kein Mitarbeitergerät gefunden werden.
1. Stellen Sie sicher, dass das geteilte Verzeichnis der Steuerungsgeräte und die Mitarbeitergeräte konsistent sind und dass auf die Pfade zugegriffen werden kann;
2. Schließen Sie die Antiviren- und Sicherheitssoftware und starten Sie die Suche erneut;
3. Deaktivieren Sie die Firewall der Steuerungs- und Mitarbeitergeräte.
4. Versuchen Sie erneut zu suchen, nachdem Sie die virtuelle Netzwerkkarte deaktiviert haben (Netzwerkeinstellungen → Adapteroption ändern → Mit Hyper-V gestartete Netzwerke deaktivieren).
- 22.Es liegen bereits Ergebnisse der Triangulation aus der Luft vor und die Fotos sind auf der lokalen Festplatte gespeichert. Erfolgt erneut eine Triangulation aus der Luft, falls mit Cluster eine Punktwolke oder eine Modellrekonstruktion durchgeführt wird?
Nein, die Fotos und die bestehenden Ergebnisse der Triangulation aus der Luft werden automatisch im Netzwerkspeicher (NAS) zur Cluster-Rekonstruktion gespeichert.
- 23.Diese Eingabeaufforderung erscheint für ein Mitarbeitergerät: „Skriptfehler.“
Überprüfen Sie zunächst, dass Sie eine Software wie Microsoft OneDrive, Outlook, Microsoft Teams und Flash verwenden. Die Software kann bei Bedarf deinstalliert werden;
Bei Bedarf versuchen Sie:
(1) Die oben aufgeführte Software zu aktualisieren
(2) Das Win10-System zu aktualisieren
(3) Den Treiber zu aktualisieren
(4) Die Durchführung dieser Einstellung: IE Sicherheitsstrategie - dynamische Skripte zulassen
(5) Die Durchführung dieser Einstellung: IE erweiterte Einstellungen - Zurücksetzen
- 24.Wird ein Problem mit einem einzelnen Gerät den Rekonstruktionsauftrag beeinträchtigen?
Ein einzelner Fehler mit dem Mitarbeitergerät wird kein Fehlschlagen des Rekonstruktionsauftrags verursachen. Ein fehlgeschlagener Auftrag mit dem Mitarbeitergerät wird durch das Steuerungsgerät neu zugeteilt. Hat auch das neu zugeteilte Mitarbeitergerät Fehler, wird der Rekonstruktionsauftrag fehlschlagen.
- 25.Wird eine Wiederaufnahme von einem Stopp für Cluster-Aufträge unterstützt?
Ja.
- 26.Wo kann ich die Protokolle der Aufträge zur Cluster-Rekonstruktion abrufen?
1. Öffnen Sie im Steuerungsgerät DJI Terra, drücken Sie Ctrl+Alt+L, suchen sie alle Protokolle aus dem entsprechenden Zeitraum des fehlgeschlagenen Auftrags im Ordner und exportieren Sie die Protokolle;
2. Im geteilten Verzeichnis suchen Sie alle Protokolle des Protokollordners [workers_log], die zum Auftrag gehören, und exportieren Sie sie;
3. SDK_log.txt im Modell (3D)- oder Karten (2D)-Ordner im Verzeichniscache dieses Auftrags.
- 27.Warum befinden sich alle Arbeitsgeräte in bestimmten Phasen der Rekonstruktion im Vorbereitungszustand, während sich einige Arbeitsgeräte in bestimmten anderen Phasen im Arbeitszustand und die anderen im Vorbereitungszustand befinden?
Der Rekonstruktionsprozess ist in mehrere Stufen unterteilt, die nacheinander durchgeführt werden sollen. Einige Phasen werden unabhängig voneinander auf dem Steuerungsgerät ausgeführt. Zu diesem Zeitpunkt befinden sich alle Arbeitsgeräte im Vorbereitungszustand.
Einige Phasen sind in mehrere Einsätze unterteilt, die dann dem Arbeitsgerät zur Verarbeitung zugewiesen werden. Die Arbeitsgeräte, die die zugewiesenen Einsätze abgeschlossen haben, befinden sich im Vorbereitungszustand und treten in die nächste Rekonstruktionsphase ein, nachdem die anderen Arbeitsgeräte ebenfalls ihre Verarbeitung abgeschlossen haben.
- Zenmuse L1 Lidar-Punktwolken-Verarbeitung
- 1.Muss ich eine Lizenz erwerben, um den DJI Terra LiDAR zur Verarbeitung der Punktwolkendaten verwenden zu können?
Nein, die Zenmuse L1-Punktwolkenverarbeitung ist eine kostenlose Funktion, aber wenn die Optimierung der Punktwolkengenauigkeit gewünscht wird, müssen Sie die Lizenz für die Pro-Version oder höher kaufen.
- 2. Werden bei LiDAR-Punktwolken-Einsätzen 3D-Modelle erstellt?
Nein.
- 3. Welche Daten sollten beim LiDAR-Punktwolkenprozess importiert werden?
Importierte Ordner müssen LiDAR-Punktwolkendaten, RTK-Daten und IMU-Daten enthalten, wobei JPEG-Daten je nach Bedarf importiert werden können (wählen Sie den Ordner aus, der nach der Datenerfassungszeit benannt ist).

- 4.Wie würde das Ausgabeformat des Routendokuments aussehen?
Die Routendokumente liegen im .out- und .txt-Format vor, d. h. im Format SBET und SMRMSG. Das Format wird nachfolgend beschrieben:
SBET

SMRMSG

- 5. Was ist die effektive Punktwolkendistanz? Wie richte ich eine effektive Punktwolkendistanz ein? Unter welchen Umständen muss ich eine Einrichtung vornehmen?
1. Effektive Punktwolkendistanz: Eine Punktwolke, die die Distanz zum LiDAR überschreitet, wird während der Nachbearbeitung herausgefiltert.
2. So richten Sie eine effektive Punktwolkendistanz ein: Schätzen Sie beim Erfassen der Daten die maximale geradlinige Distanz zwischen dem Standort des LiDAR und dem entsprechenden Zielbereich.
3. Umstände, unter denen eine Einrichtung vorgenommen werden muss: Wenn Sie einen näheren Messbereich rekonstruieren und unweigerlich entfernte Hintergrundbereiche erfasst werden, können Sie eine effektive Distanz festlegen, um ein besseres Punktwolkenergebnis zu erzielen.
- 6. Was ist die Optimierung der Punktwolkengenauigkeit? Wann muss ich die Optimierung der Punktwolkengenauigkeit aktivieren?
1. Optimierung der Punktwolkengenauigkeit: Optimieren Sie Punktwolkendaten, die zu unterschiedlichen Zeiten gescannt wurden, um die Genauigkeit der Gesamtpunktwolke zu erhöhen.
2. Wann die Optimierung der Punktwolkengenauigkeit aktiviert werden muss: Wenn diese Option deaktiviert ist und die Ergebnisse eine offensichtliche Fehlstellung der Ebene enthalten, aktivieren Sie die Funktion zur Optimierung der Punktwolkengenauigkeit, um das Problem zu beheben.
- 7. Was ist das standardmäßige Ausgabekoordinatensystem? Kann ich die Koordinaten ändern?
Das Standardkoordinatensystem ist WGS84 und kann geändert werden.
- 8. Wie verarbeite ich eine Punktwolkendatei, wenn sie zu groß ist?
Es wird empfohlen, es für die Verarbeitung in mehrere Aufgaben aufzuteilen.
- 9. Was bedeutet der Wert der Farbleisten-Remission? Und wie groß wäre deren Bereich?
Die Remission des gemessenen Ziels liegt zwischen 0 und 255. Ein Wert zwischen 0 und 150 steht für einen Remissionswert zwischen 0-100 % im Rahmen des Lambertschen Kosinusgesetzes. Ein Wert zwischen 151 und 255 entspricht der Remission eines Zielobjekts mit Retroreflektionseigenschaften.
- 10. Welche Daten werden in der LAS-Datei aufgezeichnet?
Die 3D-Koordinaten, RGB-Farbe, Remission, GPS-Zeitstempel, Anzahl an Rückläufen, die tatsächliche Rücklaufanzahl und der Abtastwinkel der Punkte werden aufgezeichnet, ebenso die Gesamtanzahl der Punkte jedes Rücklaufs, die Software und Version der erzeugten Ergebnisse und das geografische Koordinatensystem.
- 11. Welche Datei-Ausgabeformate werden von der LiDAR-Punktwolke verarbeitet?
.pnts, .las, .s3mb, .ply, und .pcd
- Über die Zenmuse L1-Kalibrierung
- 1.Wie oft muss das Zenmuse L1-Gerät kalibriert werden?
Die Kalibrierhäufigkeit variiert je nach tatsächlicher Nutzung. Wenn die Ergebnisse der Punktwolken-Nachbearbeitung geschichtet sind, eine ungenaue Farbwiedergabe aufweisen oder das Gerät versehentlich fallen gelassen wird, können Sie den Zenmuse L1-Kalibrierungsmodus für die Verarbeitung verwenden und dann die Kalibrierungsdatei zur Gerätekalibrierung auf die Fernsteuerung exportieren.
- 2.Wie plane ich Routen zum Sammeln von Kalibriermaterialien?
Es wird empfohlen, DJI Pilot zu verwenden, um die Route zum Erfassen von Kalibriermaterialien zu planen. Die Anforderungen an die Routenplanung sind wie folgt:
1. Vermessungsgebiet: Ein Vermessungsgebiet von mindestens 300 x 300 m mit offensichtlichen Texturmerkmalen und Gebäudefassaden.
2. Die Schrägbild-Fotografie-Route wird mit aktiviertem Scan-Wiederholungsmodus, einer Routengeschwindigkeit von ≥10 m/s, einer Routenhöhe von 100 m, einem vorderen Überlappungsverhältnis von ≥80 % und einem seitlichen Überlappungsverhältnis von ≥60 % empfohlen.
3. Die Modell-Färbung muss aktiviert sein (beim Erfassen von Fotos mit sichtbarem Licht).
4. Sie können entweder RTK oder PPK verwenden.
- 3.Wie überprüfe ich, ob die Kalibrierung normkonform ist, nachdem die Daten importiert und der Kalibrierungsvorgang abgeschlossen ist?
1. Im Vermessungsgebiet können Kontrollpunkte eingerichtet werden, damit Sie die Genauigkeit der Kontrollpunkte basierend auf den Rekonstruktionsergebnissen der Kalibrierungsroute überprüfen können. Wenn die Genauigkeit die Genauigkeit des Engineering-Projekts erreicht, ist die Kalibrierung konform.
2. Beobachten Sie, ob die Farbgebung der Punktwolkenergebnisse korrekt und nicht geschichtet ist.
- Über die Kalibrierung der Zenmuse P1
- 1.Wie sollte ich die Kalibrierroute entwerfen und welche Parameter sollte ich einstellen? Benötige ich RTK für die Routenerfassung?
Du kannst die Kalibrierroute mit in 5 Richtungen geneigten bzw. geschwenkten Aufnahmen oder mit herkömmlichen Schrägaufnahmen von 5 Routen entwerfen.
Für ein zuverlässigeres Kalibrierergebnis empfehlen wir die folgenden Parameter:
- Aufnahme von mindestens 500 Bildern
- Vordere Überschneidung von mindestens 80 %
- Seitliche Überschneidung von mindestens 70 %
- Anteil an Schrägaufnahmen von mindestens 2/3
- Kalibrierszenario mit einem großen Höhenunterschiedsbereich
RTK ist nicht erforderlich. Du kannst die Qualität der Kalibrierergebnisse jedoch mithilfe von RTK in Verbindung mit dem Kontrollpunkt-Design überprüfen.
- 2.Wie prüfe ich nach fertiggestellter Rekonstruktion, ob die Routendaten dem Kalibrierstandard entsprechen?
Wenn RTK-Positionsdaten für die Erfassung der Kalibrierroute verfügbar sind, kannst du die Genauigkeit der Kontrollpunkte basierend auf den Ergebnissen der Rekonstruktion der Kalibrierroute überprüfen, indem du im Vermessungsbereich Kontrollpunkte anwendest. Wenn die Genauigkeit der erforderlichen technischen Genauigkeit entspricht, dann entspricht die Kalibrierung auch dem Standard.
Wenn keine RTK-Positionsdaten für die Erfassung der Kalibrierroute verfügbar sind, kannst du nicht quantitativ bewerten, ob die Kalibrierung dem Standard entspricht. Eine Überprüfung ist jedoch basierend auf der Differenz zwischen dem Anfangswert und dem optimierten Wert des Kameraparameters „Brennweite“ f und der Hauptpunkte cx, cy für die Rekonstruktion von Schrägaufnahmen nach der Kamerakalibrierung möglich. Wenn keine signifikante Differenz vorliegt, kannst du davon ausgehen, dass die Kalibrierung dem Standard entspricht.
- 3.Wie oft sollte ich das Lastgerät kalibrieren?
Wie oft du das Lastgerät kalibrieren solltest, hängt von tatsächlichen Einsatz ab. Wir empfehlen, die Kamera mithilfe der neuesten Rekonstruktionskalibrierdatei zu kalibrieren, wenn eine signifikante Differenz zwischen dem Anfangswert und dem optimierten Wert des Kameraparameters „Brennweite“ f und der Hauptpunkte cx, cy im Rekonstruktionsqualitätsbericht vorliegt und das Rekonstruktionsergebnis den Anforderungen an die technische Genauigkeit entspricht.
- Multispektrale 2D-Rekonstruktion
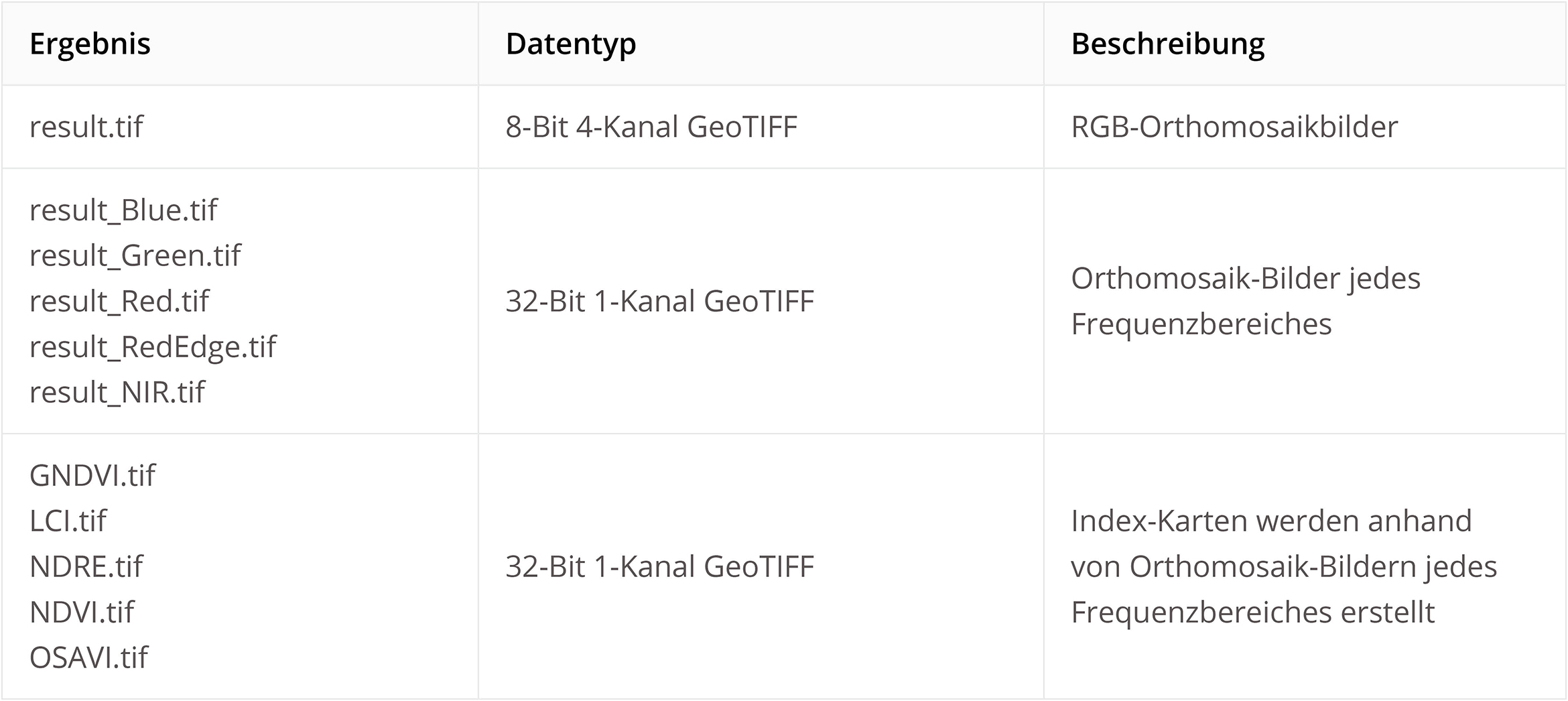
- 1.Welche Ergebnisse können aus einer multispektralen 2D-Rekonstruktion exportiert werden?
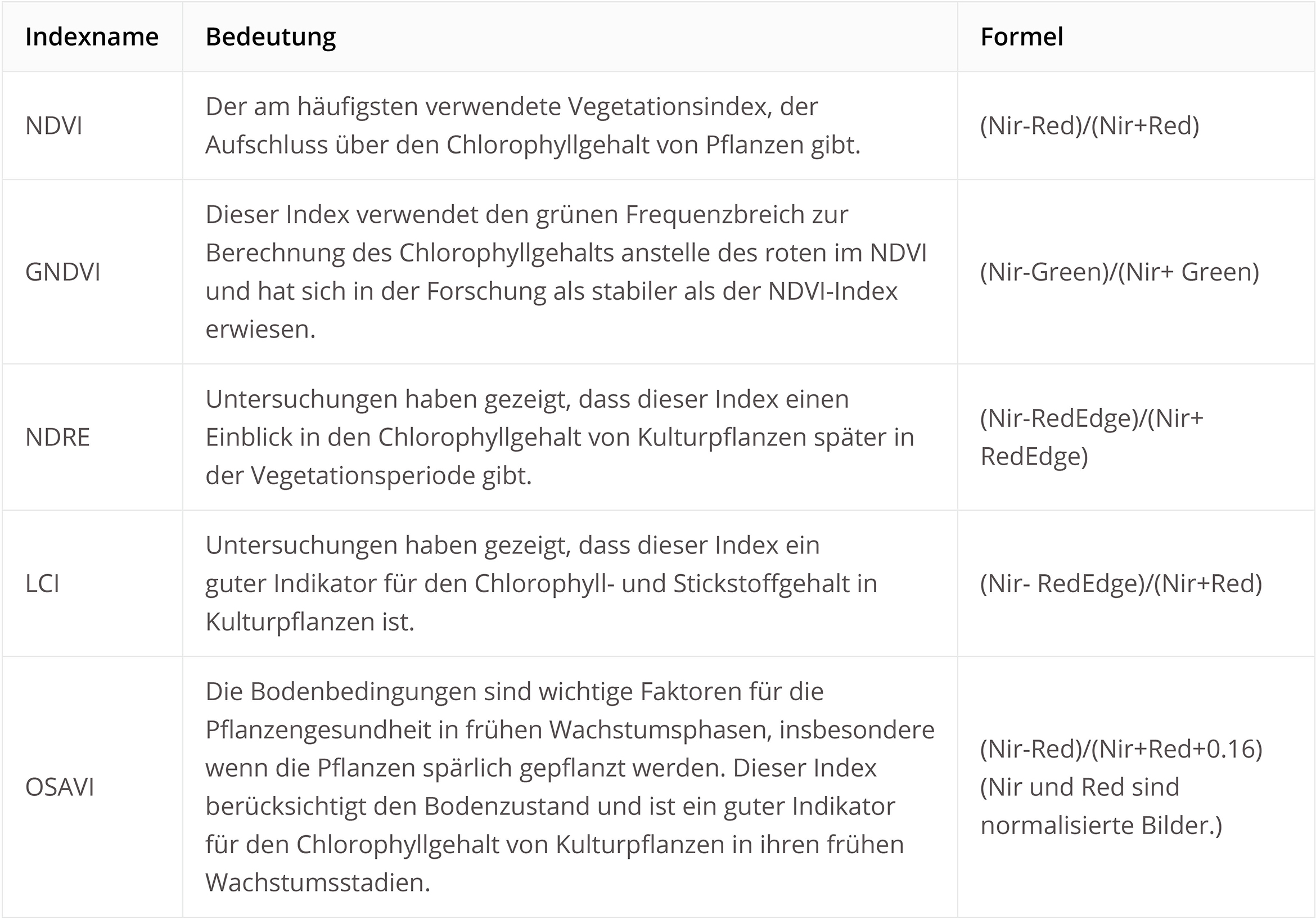
- 2.Wie werden die Vegetationsindizes bei der multispektralen 2D-Rekonstruktion berechnet und was bedeuten sie?
- 3.Unterstützt der 2D-Multispektral-Konstruktionsmodus auch Daten von anderen Multispektralkameras als der P4 Multispectral?
Momentan nicht.
- 4.Kann ich multispektrale 2D-Rekonstruktionen erstellen, ohne RGB-Bilder zu importieren?
Nein. Derzeit sind RGB-Bilder für multispektrale 2D-Rekonstruktionen erforderlich.
- 5.Können Bilder einer bestimmten Bandbreite , die von einer P4-Multispektralkamera aufgenommen wurden, in die DJI Terra zum Zwecke einer 2D-Multispektral-Rekonstruktion importiert werden?
Ja. Zur Durchführung einer Rekonstruktion müssen Sie nur RGB-Bilder importieren, einschließlich Bilder innerhalb der Bandbreiten, die von einem bestimmten Vegetationsindex zur Durchführung einer Rekonstruktion erforderlich ist.
- 6.Unterstützt die 2D-Multispektral-Rekonstruktion die radiometrische Korrektur?
Ja, vor der Rekonstruktion kannst du Kalibrierdaten für die radiometrische Korrektur importieren.
- 7.Wie viele Datensätze der Kalibrierungsplatte unterstützt die Strahlungskalibrierung?
Sie unterstützt bis zu drei Datensätze der Kalibrierungsplatte.
- Weiteres
- 1.Kann ich die Positionsinformationen der 2D- und 3D-Rekonstruktion anpassen?
Ja. Standardmäßig ist dieser Pfad: „C:\Benutzer\[Benutzername]\Dokumente\DJI\DJI Terra“. Sie können diesen Pfad anpassen, indem Sie ihn hier ändern:

>>

>> „Cache directory“.
- 2.Kann ich die in DJI Terra erzeugten Modelle in anderen Programmen (wie z.B. Maya, Blender SketchUp, 3ds Max) verwenden?
Die in DJI Terra generierten OBJ-Dateien lassen sich in Maya, Blender, SketchUp oder 3ds Max importieren. Details zum weiteren Vorgehen in diesen Programmen finden Sie in den Tutorials der Softwarehersteller.
- 3.Kann ich ein 3D-Modell in eine Webseite einbetten?
Ja, B3DM-, OSGB- und PLY-Dateien aus DJI Terra sind Standarddateiformate, welche sich in Webseiten einbetten lassen. Hinweise zur konkreten Einbettung finden Sie online.
- 4.Kann ich auch Aufnahmen zur Erstellung von 2D- oder 3D-Modellen verwenden, die nicht aus der Luft aufgenommen wurden?
Theoretisch können diese genutzt werden, um 3D-Modelle zu rekonstruieren, jedoch ist die Qualität möglicherweise schlechter. Sie können nicht zur Erzeugung von 2D-Rekonstruktionen genutzt werden.
- 5.Kann ich mit DJI Terra Aufnahmen zu 2D- und 3D-Modellen verarbeiten, welche nicht mit Drohnen von DJI aufgenommen wurden?
Theoretisch können auch andere DJI Drohnen zur Erstellung von 3D-Modellen verwendet werden, jedoch ist das Ergebnis möglicherweise nicht optimal. Die Qualität der Rekonstruktionen profitiert von in den Fotos enthaltenen GPS- oder RTK-Daten. Echtzeit-2D-Rekonstruktionen sind nicht möglich.
- 6.Welche Tastenkombinationen kann ich in DJI Terra verwenden?
- 7.Eine Eingabeaufforderung wird in DJI Terra angezeigt, die besagt, dass die maximale verbindlich vereinbarte Frist erreicht wurde.
1. Überprüfen Sie, ob die an die Software gebundenen Computer einer Hardware-Änderung unterzogen wurden. Alle Änderungen des Festplatten-Speicherorts oder ein Austausch der CPU machen die vorherigen verbindlichen Einstellungen ungültig;
2. Überprüfen Sie, ob Sie irgendein Hardwaregerät an einen Cloudserver gebunden haben, wie z. B. Alibaba Cloud und Tencent Cloud, was die vorherigen verbindlichen Einstellungen ungültig macht.
- 8.DJI Terra fährt mit dem Laden fort und das normale Starten schlägt fehl.
1. Überprüfen Sie ob irgendeine andere Software (oder ein Virus, trojanisches Pferd, Adware usw.) auf Ihrem Computer installiert wurde, die verhindert, dass DJI Terra eine Internetverbindung herstellen kann. Das kann mit einer Zurücksetzung der Netzwerke des Windows-Systems behoben werden.
2. Überprüfen Sie, ob irgendeine VPN-Software aktiviert wurde. Wenn ja, dann deaktivieren Sie die VPN oder konfigurieren Sie die VPN ordnungsgemäß.
- 9.Das System zeigt Folgendes an: Keine Lizenz. Kontaktieren Sie Ihren örtlichen Händler.
Sie sehen die folgenden Daten im Protokoll:
[GetAvailableFunc] iDate: 1596520841 iCurDate: 1596520513 iEndDate:1596729600
[GetAvailableFunc] Local license out of date (lokale Lizenz abgelaufen).
iDate ist die Zeit des Servers und iCurDate ist die aktuelle Zeit des Computers des Benutzers. Die Lizenz kann nicht verwendet werden, wenn Folgendes zutrifft: iDate > iCurDate.
Normalerweise ist der Wert von iCurDate größer als der Wert von iDate. Es kann sein, dass die Uhr Ihres Computers langsam ist. Sie können versuchen, die Zeit zurücksetzen. Sowohl Win7 als auch Win10 unterstützen automatische Online-Zeitkalibrierung. Wir empfehlen Ihnen, diese Funktion zu aktivieren.